One of the key challenges in implementing microservices architecture is ensuring effective communication between different microservices. Since microservices are small, independent services that perform specific functions, they need to communicate with each other to exchange data and coordinate their actions.
There are several approaches to communication between microservices, each with its own advantages and disadvantages and there are three main patterns for communication: Synchronous, Asynchronous and Event-driven. In this part, we’re going through these and several other key aspects that come with microservice communication.
If you haven’t read part 1, I’d highly suggest doing so. In that part, we discussed the general architecture of microservices and where some of my personal experiences were shared.
Communication patterns
Microservices architecture relies heavily on communication among different services to enable them to work together as a cohesive system. Thus, the design and implementation of communication protocols and interfaces is a critical aspects of microservices architecture.
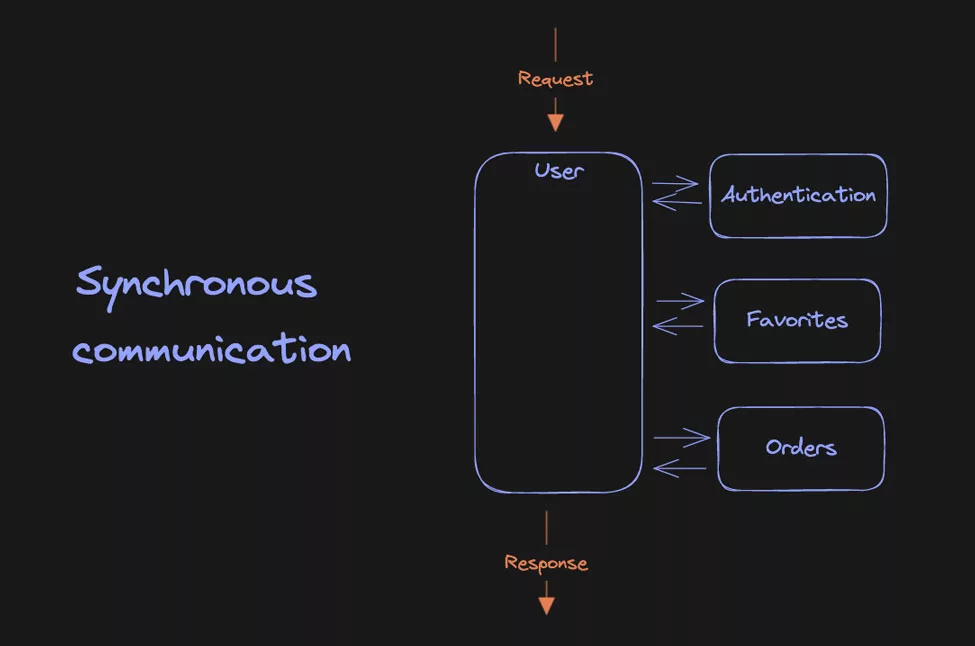
Synchronous Communication
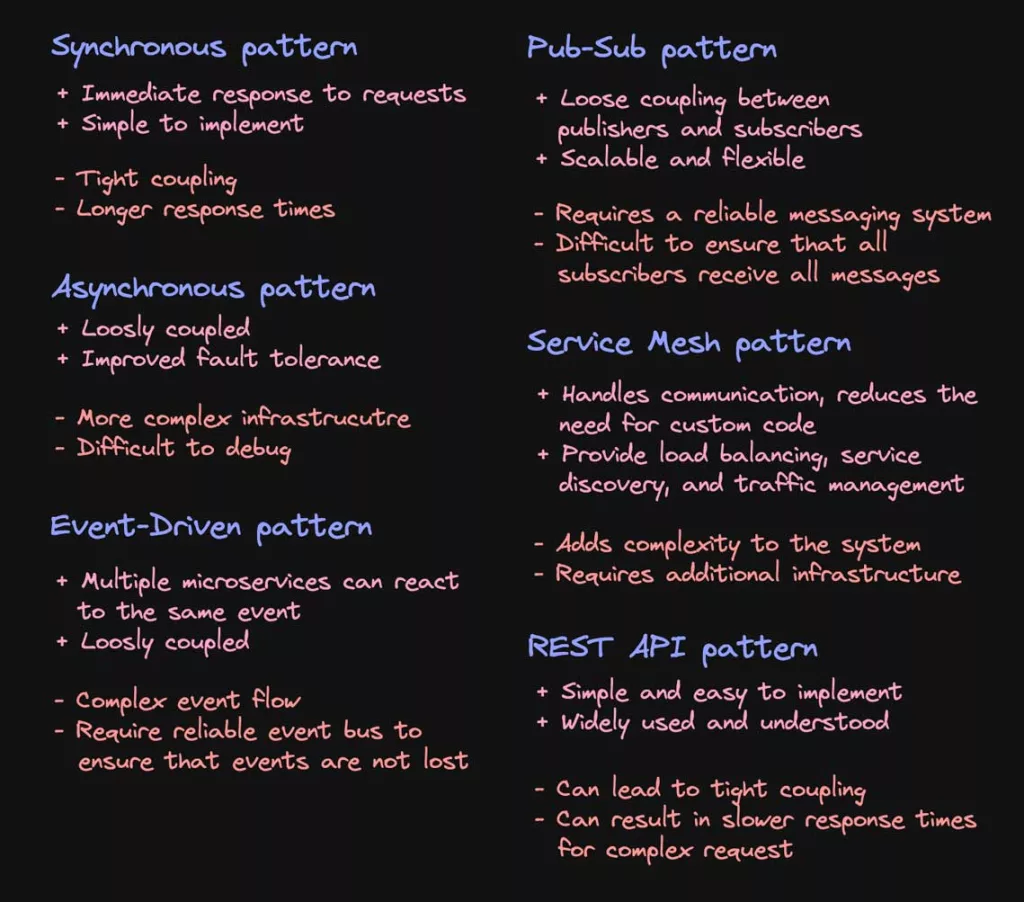
Sometimes referred to as the Request-Response pattern. Here, a microservice sends a request to another microservice and waits for a response before continuing its own processing. This is often done using RESTful APIs or similar technologies. Synchronous communication can be easy to implement and can provide strong consistency between services, but it can also introduce latency and reduce the overall system’s scalability as this can introduce tight coupling between services. Synchronous communication is simple and easy to understand, with a familiar request-response pattern. It is also typically the easiest pattern to implement and debug, as errors are immediately visible. Synchronous communication works great where real-time interaction is required between different services. The Request-Response pattern is commonly used with RPC (Remote Procedure Call) frameworks like gRPC and Thrift since the Request-Response pattern works typically best with simple remote procedure calls.
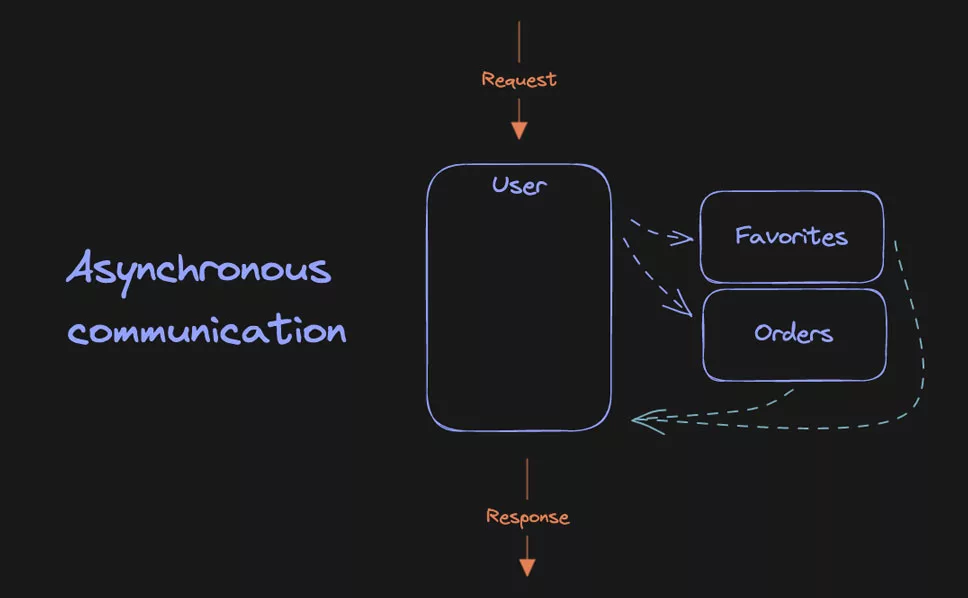
Asynchronous Communication
The asynchronous communication pattern, on the other hand, allows microservices to communicate without the need for immediate responses. In this pattern, the requester sends a message to the receiver and continues with its own tasks without waiting for a response. The receiving microservice processes the message when it’s ready, and sends a response back if necessary. Asynchronous communication can improve system scalability and reduce latency, but it can also introduce complexity and require additional infrastructure to manage to message. One key responsibility of the communication infrastructure with asynchronous communication is ensuring no messages are lost in transactions. More on this later.
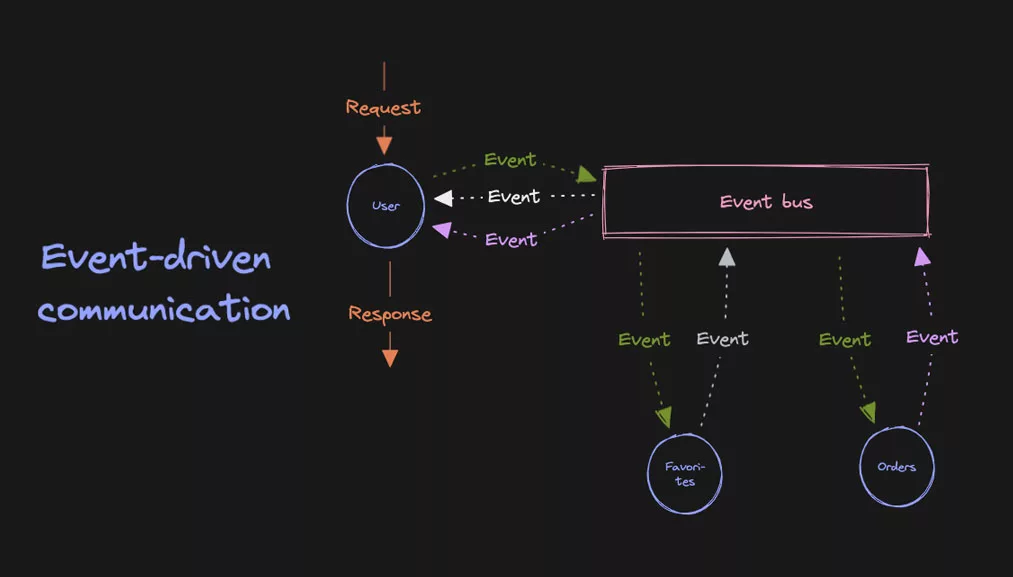
Event-Driven Communication
Event-Driven Communication is a variant of asynchronous communication, where microservices communicate through a message broker that facilitates the exchange of events. Each microservice publishes events when certain actions occur, and other microservices can subscribe to those events and react accordingly. Event-driven communication can enable loosely-coupled systems and provide greater flexibility, but it can also introduce potential issues with event ordering and consistency.
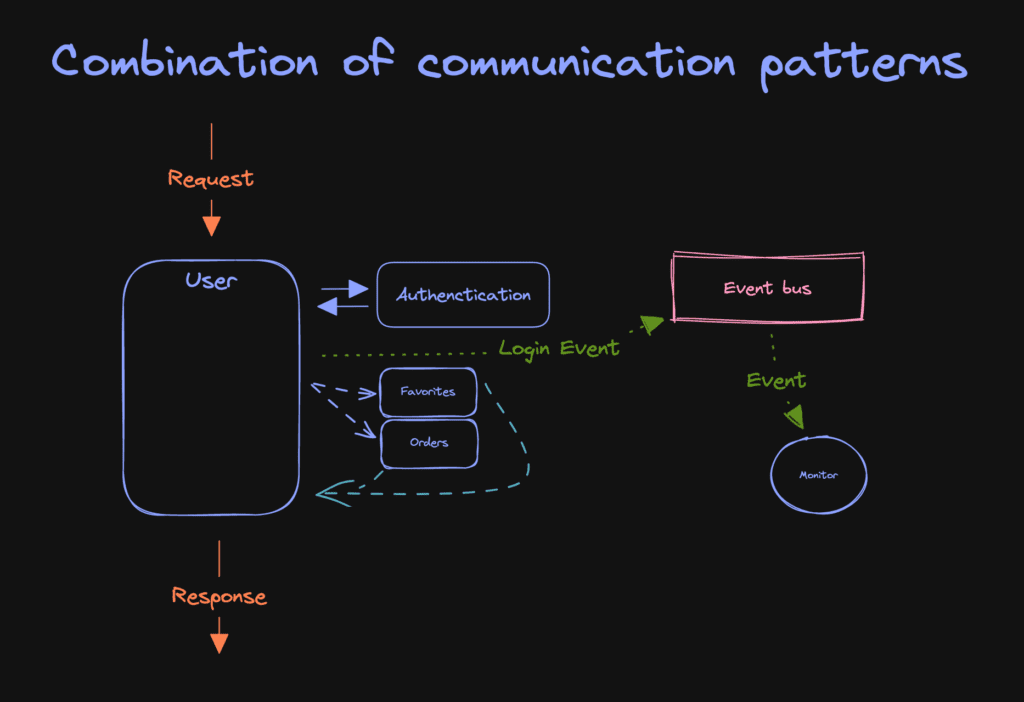
Choosing the right communication approach for your microservices architecture depends on your specific needs and requirements. You may need to use a combination of approaches to achieve the desired level of consistency, scalability, and flexibility.
In addition to choosing the right communication approach, there are also several best practices for effective communication between microservices:
- Use standardised protocols and formats: Using common protocols and data formats can make it easier for microservices to communicate with each other and reduce potential errors.
- Implement proper error handling and retry mechanisms: since communication between microservices can fail for various reasons, it’s important to have robust error handling and retry mechanisms in place to ensure reliable communication.
- Monitor and analyse communication patterns: Monitoring and analysing communication patterns between microservices can help identify potential bottlenecks, performance issues, and opportunities for optimisation.
Effective communication between microservices is essential for a successful microservices architecture. By choosing the right communication approach and following best practices, you can ensure that your microservices are able to exchange data and coordinate their actions efficiently and reliably.
More patterns
On top of the above-mentioned patterns, there are numerous other patterns, such as:
Publish-Subscribe pattern – In this pattern, publishers send messages to a channel, and subscribers receive messages from the channel. It’s similar to the event-driven pattern, but the messages are not tied to a specific event.
Service Mesh pattern – In this pattern, a service mesh is added to the communication layer of microservices. The service mesh handles service-to-service communication, load balancing, and service discovery.
REST API pattern – In this pattern, microservices communicate using HTTP requests and responses. It’s a simple and widely used pattern, but it can lead to tight coupling between microservices. Resembles the Request-Response pattern but uses the HTTP protocol instead of RPC.
Each of the patterns described has its advantages and disadvantages, and none is better than the other. The pattern you choose is simply based on the need of your project.
Fault tolerance and Resilience
Fault tolerance and resilience are essential characteristics of microservices architecture. A fault in one microservice should not affect the entire system, and the system should be able to recover from errors quickly. There are several techniques for achieving fault tolerance and resilience in a microservices architecture.
One technique is to use circuit breakers, which monitor the requests to a microservice and break the circuit if the requests fail. This prevents the failure from cascading to other microservices and allows the system to recover quickly. Another technique is to use bulkheads, which isolate different parts of the system so that a failure in one part does not affect the other parts. This can be achieved by using separate threads, processes, or even separate microservices.
Another way to achieve fault tolerance and resilience is to use a retry mechanism. If a request fails, the client can retry the request several times before giving up. This can be useful in situations where the failure is temporary, such as a network outage.
When implementing the retry mechanism we should make sure that for example, we do not save multiple records in our databases.
Monitoring and observability are also essential for achieving fault tolerance and resilience in a microservices architecture. Monitoring involves collecting data about the system’s performance and health, such as response time, error rate, and resource usage. Observability involves understanding the system’s behaviour and performance from the data collected through monitoring. It can help identify issues and optimize the system’s performance.
There are several tools and techniques for monitoring and observability in a microservices architecture. Monitoring and observability will be covered in the next part.
In conclusion, fault tolerance and resilience are critical characteristics of microservices architecture. Circuit breakers, bulkheads, and retry mechanisms can be used to achieve fault tolerance and resilience. Monitoring and observability are also essential for identifying issues and optimizing the system’s performance. There are several tools and techniques available for monitoring and observability in a microservices architecture.
Summary
This part of the miniseries discusses the challenges of communication between microservices in a microservices architecture and outlines three main patterns for communication: synchronous, asynchronous, and event-driven. The document also provides best practices for effective communication, such as using standardized protocols and formats, implementing proper error handling and retry mechanisms, and monitoring and analyzing communication patterns. Additionally, the document covers fault tolerance and resilience in microservices architecture, including techniques such as circuit breakers, bulkheads, and retry mechanisms, as well as monitoring and observability.
Part 1: The Pros and Cons of Microservices: Is It Right for Your Project?
Part 2: Building a Robust Microservice Architecture: Understanding Communication Patterns
Part 3: The Importance of Monitoring and Observability in Microservice Architecture
Part 4: Securing a Microservice Architecture – 5 Pillars
Part 5: Testing in Microservices: Ensuring Quality and Reliability